BUFFER-X: Zero-Shot Point Cloud Registration in Isaac Sim
Published:
BUFFER-X Point Cloud Registration
As part of the Path Matters project at TU Berlin, this week I integrated BUFFER-X into our robotic 2D→3D reconstruction pipeline. BUFFER-X is a zero-shot point cloud registration method published as an ICCV 2025 Highlight paper by MIT SPARK Lab. It aligns two 3D point clouds into the same coordinate frame without any retraining or fine-tuning — across any scene or sensor type.
Video Walkthrough
The Problem We Were Solving
Our pipeline uses a UR5e robot arm with a simulated Basler camera in NVIDIA Isaac Sim to capture multiple views of an object and reconstruct it in 3D. The reconstruction methods we tested — VGGT, Fast3R, and SAM3D — each produce point clouds in their own coordinate frames.
The challenge: ICP (Iterative Closest Point) alignment was failing because it had no reliable initial pose to start from. Without a good starting point, ICP diverges and gives wrong results.
BUFFER-X solves this by providing a robust initial alignment before ICP runs.
Where BUFFER-X Fits in Our Pipeline
Isaac Sim Scene → Basler Camera Capture → .PLY Export + Ground Truth Pose → 2D→3D Reconstruction → Preprocessing → BUFFER-X Initial Alignment → ICP Refinement → Fitness / RMSE Score → RL Reward Signal
What is BUFFER-X?
BUFFER-X (Balanced Unified Feature-based Framework for Extended Registration) works in two stages:
- Descriptor stage — extracts local geometric features using a PointNet++ backbone with multi-scale grouping
- Pose estimation stage — uses RANSAC or KISS-Matcher to find the optimal 6-DoF rigid transformation T ∈ SE(3)
Key facts:
- Only 0.91M trainable parameters — extremely lightweight
- ~1 second per point cloud pair
- Trained once on indoor RGB-D data — works on outdoor LiDAR, synthetic Isaac Sim data, and more
- ICCV 2025 Highlight · MIT SPARK Lab
Benchmark Results — 3DMatch Indoor Dataset
I ran the full 3DMatch benchmark (1623 point cloud pairs) on our machine with an NVIDIA RTX A6000.
| Metric | Result |
|---|---|
| Recall | 97.1% |
| RMSE Recall | 95.2% |
| RTE | 5.79 cm |
| RRE | 1.80° |
| Failed pairs | 47 / 1623 |
| Inference time | ~0.89 s per pair |
| Total runtime | 28 minutes |
Why did 47 pairs fail?
1. Symmetric scenes (majority of failures) These have RRE near 90°, 125°, or exactly 180° — the scene geometry is rotationally symmetric (empty corridors, white walls, repetitive patterns). No registration method can reliably distinguish these orientations.
2. Low-overlap pairs The two scans share very little overlapping geometry. With insufficient matching surface, no reliable transformation can be estimated.
These are fundamental data challenges, not model failures.
Custom Test — Isaac Sim Basler Camera
I tested BUFFER-X on our own dataset: a Baby Yoda figurine scanned in Isaac Sim using a simulated Basler camera.
Setup:
- Ground truth:
Baby_Yoda.ply— 10,000 points, clean object, no color - Reconstruction:
points.ply— 100,000 points, full scene with RGB color
Results:
| Metric | Value |
|---|---|
| Fitness | 0.3342 |
| RMSE | 0.0287 m (2.87 cm) |
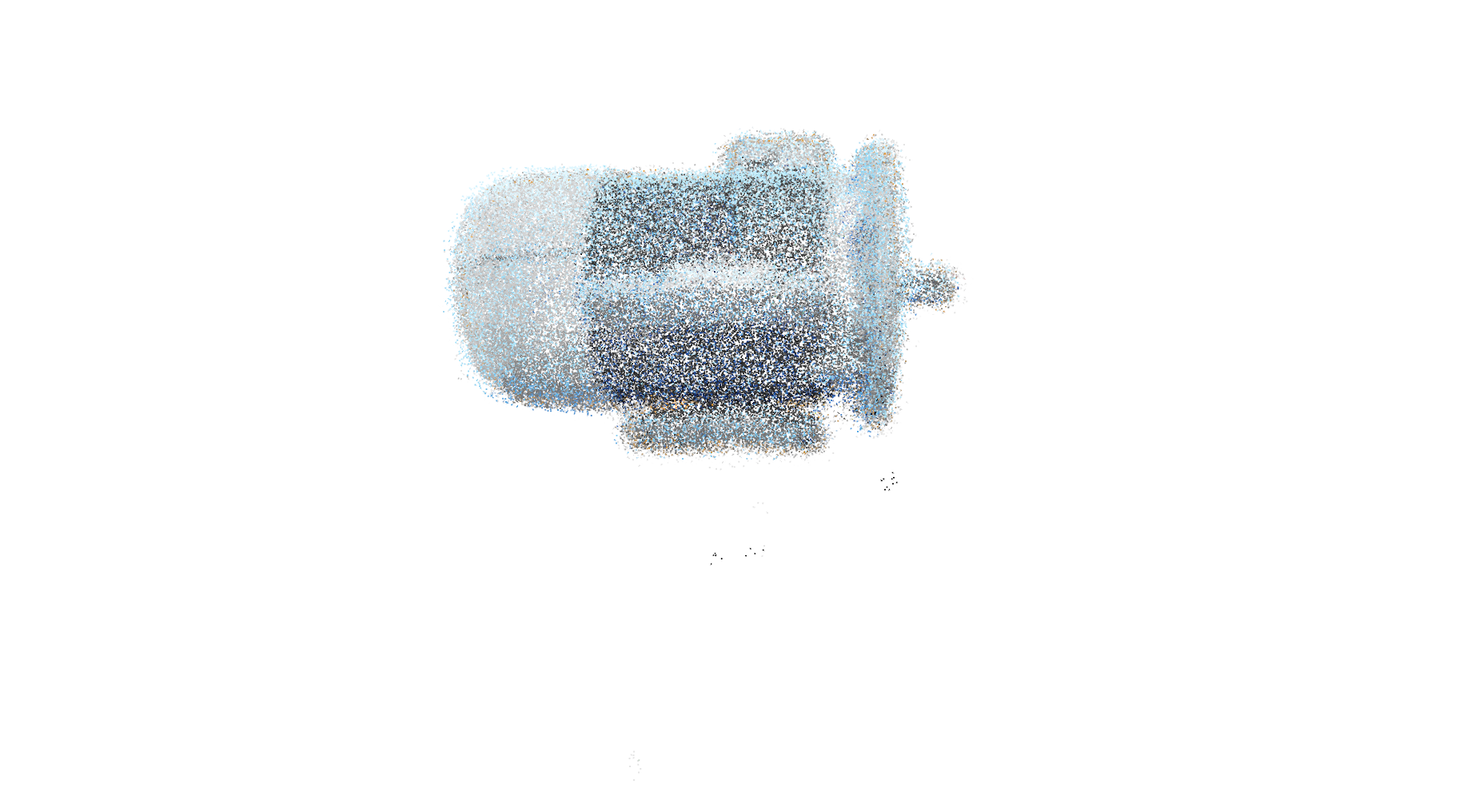
Before Alignment
After Alignment
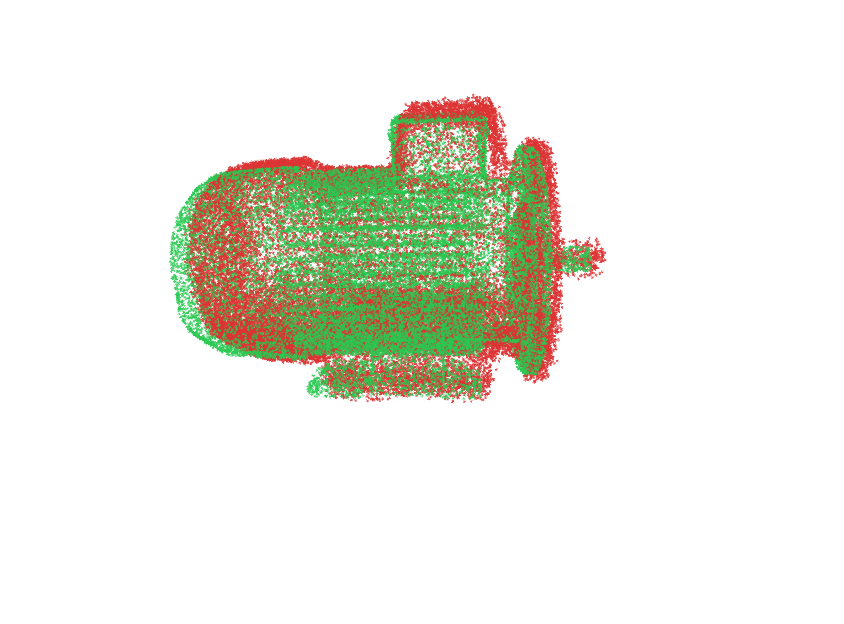
Why is Fitness 0.33?
The Fitness score of 0.33 means 33% of points were matched — which looks low but has a clear explanation: points.ply contains 100,000 points including the full Isaac Sim scene background (table, walls, floor), while Baby_Yoda.ply is a clean 10,000-point isolated object model.
The background clutter counts as unmatched points, pulling Fitness down. The RMSE of 2.87 cm on matched points shows the object itself aligned correctly — confirmed visually in the After image above.
Next step: run our preprocessing pipeline (background removal, outlier filtering) on points.ply before comparison.
Key Takeaway
BUFFER-X gives ICP a reliable initial pose — without it, ICP was diverging on our Isaac Sim data. The zero-shot capability means it works on our completely unseen Isaac Sim Basler camera data without any retraining, which is exactly what our pipeline needs.
The Fitness and RMSE scores output by BUFFER-X can also feed directly into our PPO reinforcement learning reward function — replacing the current geometric heuristics with a direct alignment quality signal.
Tools & Setup
| Component | Version |
|---|---|
| OS | Ubuntu 22.04 LTS |
| Python | 3.8 |
| PyTorch | 1.9.1+cu111 |
| CUDA | 11.1 |
| GPU | NVIDIA RTX A6000 (49GB) |
| Open3D | 0.13.0 |